
شناسایی عیب اتصال حلقه به حلقه در موتورهای القایی سه فاز به روش تحلیل پاسخ فرکانسی
مهرداد صادقی1 هادی طاریمرادی2
1دانشکده مهندسی، دانشگاه کردستان، mehrdad.sadeghi6106@gmail.com
2دانشکده مهندسی، دانشگاه کردستان، h.tarimoradi@uok.ac.ir
دریافت مقاله به صورت فایل پی دی اف PDF
چکيده – موتور القایی سه فاز روتور قفسهای یک سیستم غیرخطی است که در معرض عیوب مختلفی قرار دارد. عیب در این نوع ماشینها میتواند منجر به توقفات پیشبینی نشده در فرآیندها شود که این امر موجب تلفات بزرگ در دورههای تولید و نگهداری میشود. در این مقاله در مورد تشخیص یک نوع عیب رایج مربوط به سیمپیچی استاتور موتور موسوم به عیب اتصال حلقه به حلقه بحث میشود. از آنجا که تشخیص عیب با روشهای سنتی بهدلیل نیازمند بودن به اطلاعات قبلی از مدل دقیق موتور همیشه ممکن نیست، لذا در این مقاله از روش جدید تحلیل پاسخ فرکانسی برای تشخیص عیب استفاده شده است. جهت تشخیص عیب در این روش از انواع مختلف تابع تبدیل میتوان استفاده کرد؛ اما چون وجود عیب در سیمپیچهای موتور سبب نامتقارنی امپدانس میشود، از پاسخ فرکانس امپدانس سیمپیچها استفاده شده است. آزمایشات با دو موتور در اندازههای متفاوت و در دو حالت کاری آفلاین و آنلاین بهترتیب توسط دستگاههای WK6500B و EXP3000 انجام گرفتهاند و نتایج حاصل از رسم نمودارهای دامنه و فاز پاسخ فرکانسی توسط چهار شاخص آماری ضریب همبستگی (CC)، انحراف نرمالیزه شده جذر میانگین مربعات (SIGMA)، انحراف طیفی (NRMSD) و انحراف استاندارد مقایسهای (CSD) مقایسه شدهاند.
كليد واژه- موتورهای القایی، تشخیص عیب، روش تحلیل پاسخ فرکانسی، تابع تبدیل، عیب اتصال حلقه به حلقه و عیوب استاتور.
1- مقدمه
تحلیل پاسخ فرکانسی یک روش تحلیلی است که پیشتر برای ارزیابی عیوب ترانسفوماتور پیشنهاد شد [1]. نظارت بر شرایط کاری و تشخیص به هنگام عیب در موتورهای القایی سه فاز که چرخ محرک صنعت به شمار میروند، در قابلیت اطمینان و پایداری تولید هر صنعتی با اهمیت است، چرا که بروز عیب در قسمتهای مختلف یک موتور میتواند پیامدهای جبرانناپذیری داشته باشد.
یکی از عمومیترین عیوبی که در سیمپیچی موتورها اتفاق میافتد عیب حلقه به حلقه است، این عیب زمانیکه عایق میان دو یا چند حلقه از یک کلاف مربوط به سیمپیچی استاتور شکسته میشود، رخ میدهد و توانایی کلاف برای تولید میدان مغناطیسی متقارن را کاهش میدهد. انواع عیب سیمپیچی استاتور معمولاً با اتصال کوتاه چند حلقه مجاور مربوط به یک کلاف شروع میشود. به این ترتیب که جریان گردشی در حلقههای اتصال کوتاه شده موجب تولید گرما و افزایش دما در ناحیه معیوب سیمپیچ شده و با تخریب بیشتر عایق در آن محل، منجر به عیوب شدیدتر یعنی عیب کلاف به کلاف، عیب فاز به فاز یا عیب فاز به زمین میگردد. اگر چه اطلاعات تجربی از فاصله زمانی بین وقوع عیب اتصال حلقه تا شکست عایقی و تشدید کامل عیب وجود ندارد، ولی مشخص است که این فرآیند آنی و لحظهای نیست و سرعت آن به شدت عیب یعنی به تعداد حلقههای اتصال کوتاه شده وابسته میباشد [2].
در جدول 1 درصد احتمال وقوع عیب بر اساس استانداردهای مختلف و اهمیت عیوب مربوط به استاتور که عمدتا ناشی از عیب سیمپیچی هستند، نشان داده شده است [3].
جدول 1: احتمال وقوع عیوب در موتورهای القایی مطابق استانداردهای مختلف
| نوع عیب | IEEE-IAS | EPRI | Allianz |
| عیوب مربوط به بلبرینگها (%) | 44 | 41 | 13 |
| عیوب مربوط به استاتور (%) | 26 | 36 | 66 |
| عیوب مربوط به روتور (%) | 8 | 9 | 13 |
| سایر عیوب (%) | 22 | 14 | 8 |
سیمپیچ استاتور موتورهای القایی نیز همانند بلبرینگها و روتور میتواند تحت تأثیر عوامل مختلفی دچار عیب شود [4]. چند نوع عیب برای سیمپیچهای استاتور گزارش شده است که بیشتر آنها ریشه در خرابی عایق سیمپیچها دارند [5]. ساختمان موتورهای الکتریکی از سه دسته مواد اصلی هادیها، هسته و عایقها تشکیل شده است. عایقهای الکتریکی برخلاف هادیها و هسته در ماشینهای الکتریکی، اجزا غیرفعال محسوب میشوند. بدین معنا هیچ نقشی در تولید میدان مغناطیسی و یا هدایت آن و همچنین تولید گشتاور و هدایت جریان ندارند. در عین حال نیازمندیهای اساسی الکتریکی، حرارتی و مکانیکی را در میان اجزا فعال در ساختمان ماشینهای الکتریکی دوار، فراهم میسازند. شکل 1 انواع عیوب محتمل مربوط به سیمپیچی استاتور را نشان میدهد.
![شکل 1: انواع عیوب مختلف عایقی در سیمپیچی استاتور یک موتور القایی [6]](https://ilamcement.com/wp-content/uploads/انواع-عیوب-مختلف-عایقی.png)
شکل ۱: انواع عیوب مختلف عایقی در سیمپیچی استاتور یک موتور القایی [۶]
ناندی و همکاران با بررسی طیف ولتاژ استاتور به تشخیص عیب اتصال کوتاه در سیمپیچی استاتور پرداختند [9]. لی و همکاران از موج آلتراسونیک جهت تشخیص عیب اتصال و از هادیهای استاتور بهعنوان موجبر استفاده نمودند [10]. همچنین برزگران و همکاران به بررسی عیوب مربوط به سیمپیچی با روش المان محدود و شبکه عصبی پرداختند که در مطالعه آنها جریان ایجاد شده توسط اتصال کوتاههای سیمپیچ بهصورت نامتعادل بود [11]. از آنجاییکه روش آنالیز پاسخ فرکانسی، روشی غیرتهاجمی و با حساسیت بالا نسبت به تغییرات پارامترها میباشد، بنابراین محدوده وسیعی از کاربردها برای این مبحث میتواند درنظر گرفته شود. این تابع انتقال متأثر از فیزیک تجهیز مورد آزمایش و ساختار هندسی آن است و به مدار معادل RLCM تجهیز تحت آزمایش وابسته است؛ زیرا تغییر فیزیکی در تجهیز باعث تغییر پارامترهای شبکه RLCM معادل و در نتیجه تغییر تابع انتقال میشود. رفتار تابع انتقال میتواند محدوده وسیعی از تغییرات فیزیکی و الکتریکی تجهیز مورد نظر را نشان دهد. عیوب گوناگون در موتورهای القایی میتوانند باعث ایجاد تغییراتی در مدار تشکیلدهنده آن و پارامترهای تابع انتقال شوند.
2- روش کار
به دلیل بررسی تشخیص عیب در دو مد کاری مختلف آنلاین و آفلاین و همچنین استفاده از دو دستگاه مجزا برای این منظور، سعی شده است جهت اعتبار بخشی بیشتر به آزمایشات از دو موتور القایی در اندازههای متفاوت استفاده شود. ابتدا برای حالت آفلاین موتور القایی سه فاز روتور قفسهای مدل K21R 132 M4 HW ساخت شرکت VEM آلمان برای اجرای آزمایشات در فرکانس بالای این مقاله انتخاب گردید. مشخصات فنی موتور مدنظر بهطور کامل و دقیق مطابق جدول 2 تهیه شده است.
جدول 2: مشخصات فنی موتور القایی سه فاز 7.5 کیلووات
| مشخصه | مقادیر |
| توان نامی | 7.5 کیلووات |
| فرکانس کاری | 50 هرتز |
| ولتاژ نامی اتصال مثلث استاتور | 380 ولت |
| ولتاژ نامی اتصال ستاره استاتور | 660 ولت |
| جریان اتصال ستاره | 15.5 آمپر |
| جریان اتصال مثلث | 9 آمپر |
| ضریب قدرت موتور | 0.84 |
| دور بر دقیقه | 1450 |
| IP | 55 |
موتور مذکور به کارگاه سیمپیچی انتقال داده شد تا سیمبندی مجدد با تپهای مورد نیاز برای مدلسازی واقعی عیب، روی آن پیادهسازی شود. برای تعیین محل تپهای خروجی سیمپیچی استاتور با درنظر گرفتن استانداردهای کاری و نکاتی که باید در سیمبندی رعایت شود، در مجموع چهار تپ اضافی از سیمپیچی سه فاز استاتور از محل جعبه ترمینال موتور خارج شد و بهمنظور عملی کردن آزمایشات همچون دیگر اتصالات در دسترس قرار گیرند. شکل 2 نمایی از موتور القایی سه فاز 7.5 کیلووات پس از سیمپیچی مجدد را نشان میدهد. محل قرارگیری تپهای سیمپیچی استاتور موتور 7.5 کیلووات بهمنظور مدلسازی عیب حلقه به حلقه نیز در شکل 3 نشان داده شده است.

شکل ۲: موتور القایی سه فاز ۷٫۵ کیلووات پس از سیم پیچی مجدد

شکل 3: محل قرارگیری تپهای سیمپیچی استاتور موتور 7.5 کیلووات
همچنین به جهت انجام آزمایشات در حالت آنلاین و فرکانس پایین، یک موتور القایی سه فاز روتور قفسهای مدل M2AA100LB-4 ساخت شرکت ABB انتخاب گردید. این موتور پس از انتقال به کارگاه تعمیرات موتوری تحت سیمپیچی مجدد قرار گرفت. مشخصات فنی موتور انتخابی در جدول 3 آمده است.
جدول 3: مشخصات فنی موتور القایی سه فاز 3 کیلووات
| مشخصه | مقادیر |
| توان نامی | 3 کیلووات |
| فرکانس کاری | 50 هرتز |
| ولتاژ نامی اتصال ستاره استاتور | 380-420 ولت |
| جریان اتصال ستاره | 6.6 آمپر |
| ضریب قدرت موتور | 0.81 |
| دور بر دقیقه | 1430 |
| IP | 55 |
برای مدلسازی عیوب رایج در حالت آنلاین محدودیتهایی وجود دارد. در این حالت سعی بر این شد که از انجام مدلسازی عیب اتصال حلقه به حلقه با 15 درصد سیمپیچی یکفاز شدیدتر اجتناب گردد؛ چرا که با وصل تغذیه موتور تحت عیب اتصال کوتاه شدید احتمال اینکه موتور دچار آسیب شود، وجود خواهد داشت. بههمین دلیل در کل دو تپ اضافی از سیمپیچی سه فاز استاتور مانند سایر اتصالات در جعبه سربندی موتور قرار گرفت. شکلهای 4 و 5 به ترتیب، نمایی از موتور نامبرده و مشخصات الکتریکی آن را نشان میدهند.
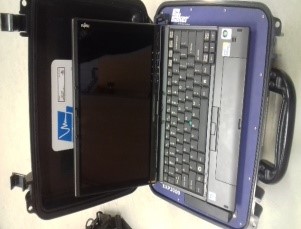
دستگاه exp3000
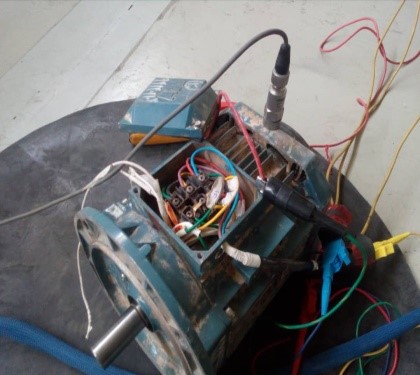
شکل 4: دستگاه exp3000 و موتور القایی 3 کیلووات جهت انجام آزمایش آنلاین

شکل 5: محل قرارگیری تپهای سیمپیچی استاتور موتور 3 کیلووات
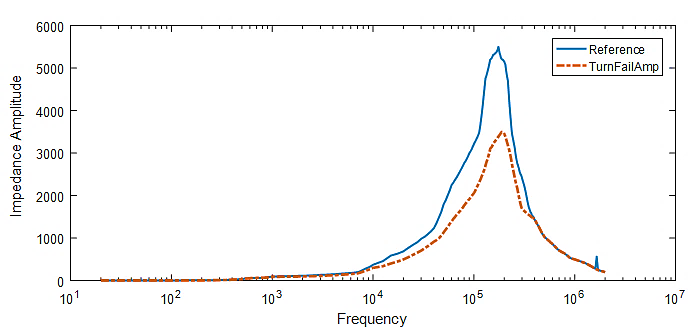
برای هر دو موتور با توجه به سرکهایی که از سیمپیچی فاز S بیرون کشیده شده است، عیب اتصال کوتاه حلقه به حلقه را میتوان به مقدار 15 درصد بین تپهای Sa و 85 درصد S مدل کرد که در این حالت انحراف از حالت مرجع وجود خواهد داشت. انتخاب محدوده اتصال کوتاه بین حلقهها اختیاری بوده و در حین بازپیچی سیمبندی موتور میتوانست کمتر یا بیشتر لحاظ شود، اما بهدلیل اینکه مصالحهای بین دقت و ایجاد انحراف قابل رویت در نمودارها ایجاد گردد، عیب اتصال 15 درصد انتخاب شد. لازم به ذکر است که در هنگام انجام آزمایشات با توجه به تاثیر موقعیت روتور بر روی دقت کار، روتور در حالت ایستا قرار گرفت و از جابجا شدن آن در حین ثبت دادهها، تا حد امکان جلوگیری شد. شرایط آزمایش مطابق جدول 4 آورده شده است. موارد (الف) و (ب) در شکل 6، بهترتیب پاسخ فرکانسی نمودارهای دامنه و فاز را برای مدلسازی عیب حلقه به حلقه نشان میدهند. مطابق این شکل، اختلاف میان نمودار اندازه حالت مرجع و حالت عیبدار قابل تشخیص است. اختلاف ذکر شده از فرکانس 7 کیلوهرتز آغاز شده و به مرور این اختلاف چشمگیرتر شده است و در نقطه اوج نمودار در فرکانس 177 کیلوهرتز نمود بیشتری پیدا کرده است. در تحلیل نمودارهای فاز نیز میتوان گفت عیب واقع شده باعث انحراف نمودار از حالت مرجع در فرکانسهای زیر 1 کیلوهرتز شده است.
جدول 4: مشخصات امکانسنجی تشخیص عیب اتصال کوتاه حلقه به حلقه به روش FRA
| هدف | تشخیص عیب اتصال کوتاه حلقه به حلقه به روش FRA |
| تابع تبدیل | امپدانس فاز S سیمپیچی استاتور در شرایطی که تپهای Sa و 85 درصد S اتصال کوتاه شدهاند. |
| پارامتر متغیر | فرکانس |
| محدوده تغییرات متغیر | 2 مگاهرتز |
| وضعیت روتور | سالم و در حالت ایستا |
| وجود عیب در استاتور | عیب اتصال کوتاه حلقه به حلقه 15 درصد |
| قدرت موتور | 7.5 کیلووات |
| وضعیت فازهای دیگر T و R | مدار باز |
الف
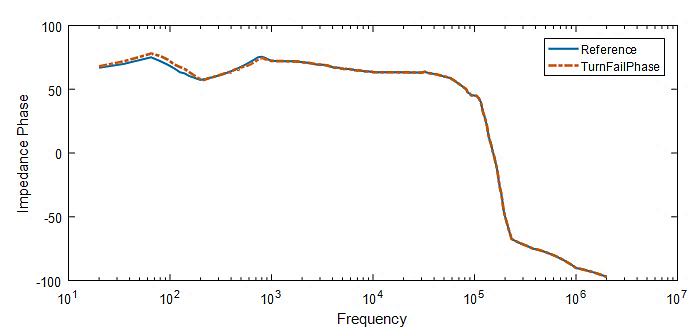
شکل 6: پاسخ فرکانسی مربوط به مدلسازی عیب حلقه به حلقه، الف) نمودار دامنه، ب) نمودار فاز
همچنین مطابق دادههای عددی میتوان استخراج کرد که نقاط اوج هر دو نمودار تقریبا به اندازه 7.5 کیلوهرتز جابجا شده است که این موضوع میتواند اختلاف موجود را بارزتر کند و این یک مزیت در تشخیص بهتر محسوب میشود.
3- شاخصهای آماری
برای مقایسه دو منحنی پاسخ فرکانسی به جای روش بصری و جهت تقویت استدلال از تعریف تعدادی شاخص آماری استفاده میشود. شاخصهای آماری مختلفی در مراجع معرفی شدهاند، با توجه به ویژگی و توانایی شاخصها، در اینجا چهار شاخص CC، SIGMA، NRMSD و CSD استفاده شده است که روابط تعریف این شاخصها در معادلات (1) تا (4) آورده شدهاند. محاسبهی شاخص برای کل بازهی فرکانسی نتایج خوبی به همراه ندارد، از طرف دیگر، هر نوع عیب تاثیر خود را بر روی یک بازهی فرکانسی مشخص میگذارد، پس بهتر است شاخصها برای بازههای فرکانسی مختلف محاسبه شوند. اختلافات ذکر شده برحسب شاخصهای مختلف در پنج محدوده فرکانسی 10 تا 20 کیلوهرتز، 20 تا 100 کیلوهرتز، 100 تا 400 کیلوهرتز، 400 کیلوهرتز تا 1 مگاهرتز و 1 تا 2 مگاهرتز مشخص شدهاند.
| (1) | |
| (2) | |
| (3) | |
| (4) |
روابط (1) تا (4)، بهترتیب ضریب همبستگی، انحراف نرمالیزه شده جذر میانگین مربعات، انحراف طیفی و انحراف استاندارد مقایسهای هستند که از شاخصهای مبتنی بر فاصله اقلیدسی محسوب میشوند. در روابط بالا، X و Y دو تابع تبدیل مبنا و اندازهگیری شده هستند که قرار است با یکدیگر مقایسه شوند و N نیز تعداد دادههای ثبتشده در هر بازه میباشد.
4- نتايج آزمایشگاهی
موارد (الف) و (ب) در شکل 7، مقادیر بهدست آمده برای چهار شاخص CC، SIGMA، NRMSD و CSD را در پنج محدوده فرکانسی، بهترتیب جهت مقایسه نمودارهای دامنه و فاز پاسخ فرکانسی حالت عیب حلقه به حلقه نسبت به حالت مرجع نشان میدهند. همانگونه که در منحنی دامنه پاسخ فرکانسی معلوم است، خطای اتصال حلقه بیشترین تاثیر را بر روی محدوده فرکانسی 100 تا 400 کیلوهرتز میگذارد که شاخصها هم این موضوع را تایید میکنند. در تحلیل مقادیر شاخصها میتوان گفت که در عیب حلقه به حلقه متناسب با شدت عیب 15 درصد بازه چهارم برای فرکانسهای بین 400 کیلوهرتز تا 1 مگاهرتز، شاخصها هیچ گونه تغییراتی نداشتهاند. این موضوع میتواند در تشخیص این نوع عیب موثر باشد. ولی جهت تحلیل شاخصها برای نمودارهای فاز، صرفا به تغییرات در محدوده اول اکتفا شده که این تغییرات نیز ناچیز میباشد. تنها بررسی عیب اتصال کوتاه حلقه به حلقه 15 درصد سیمپیچی فاز S بهدلیل خفیفتر بودن اثر اتصال کوتاه، در حالت آنلاین انجام شد و نتایج آن مطابق شکل 8 ثبت گردید.
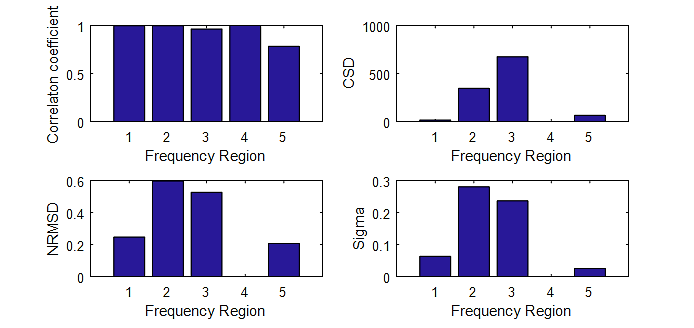
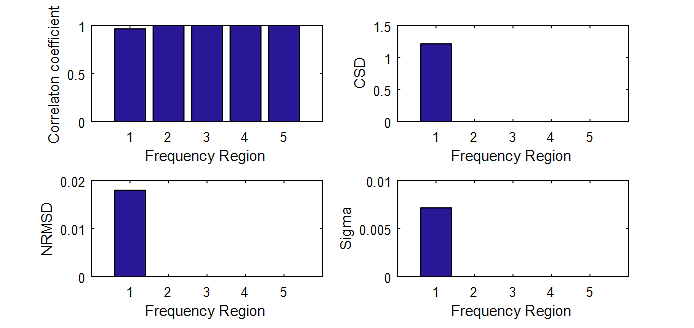
شکل 7: مقادیر چهار شاخص CC، SIGMA، NRMSD و CSD در پنج محدوده فرکانسی مختلف الف) نمودار دامنه، ب) نمودار فاز
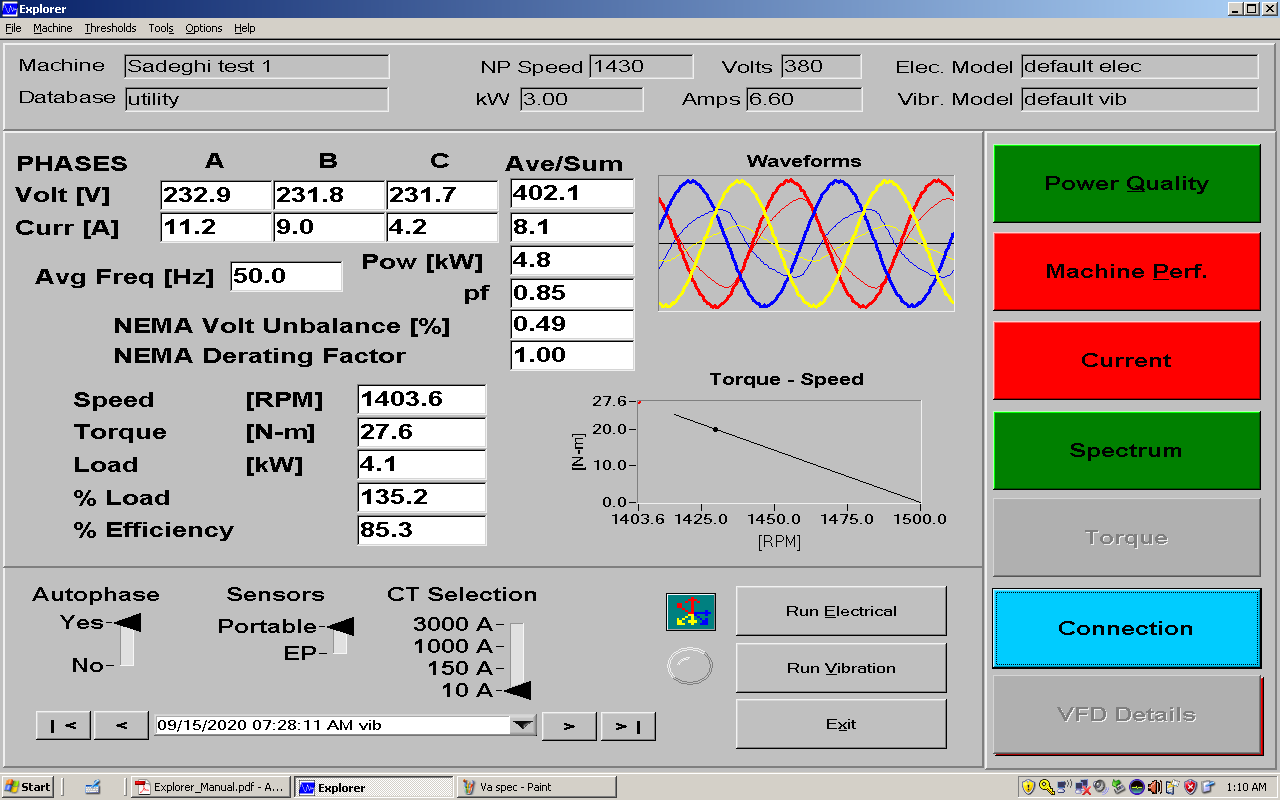
شکل 8: اندازه پارامترهای مختلف موتور در حالت اتصال حلقه به حلقه 15 درصد
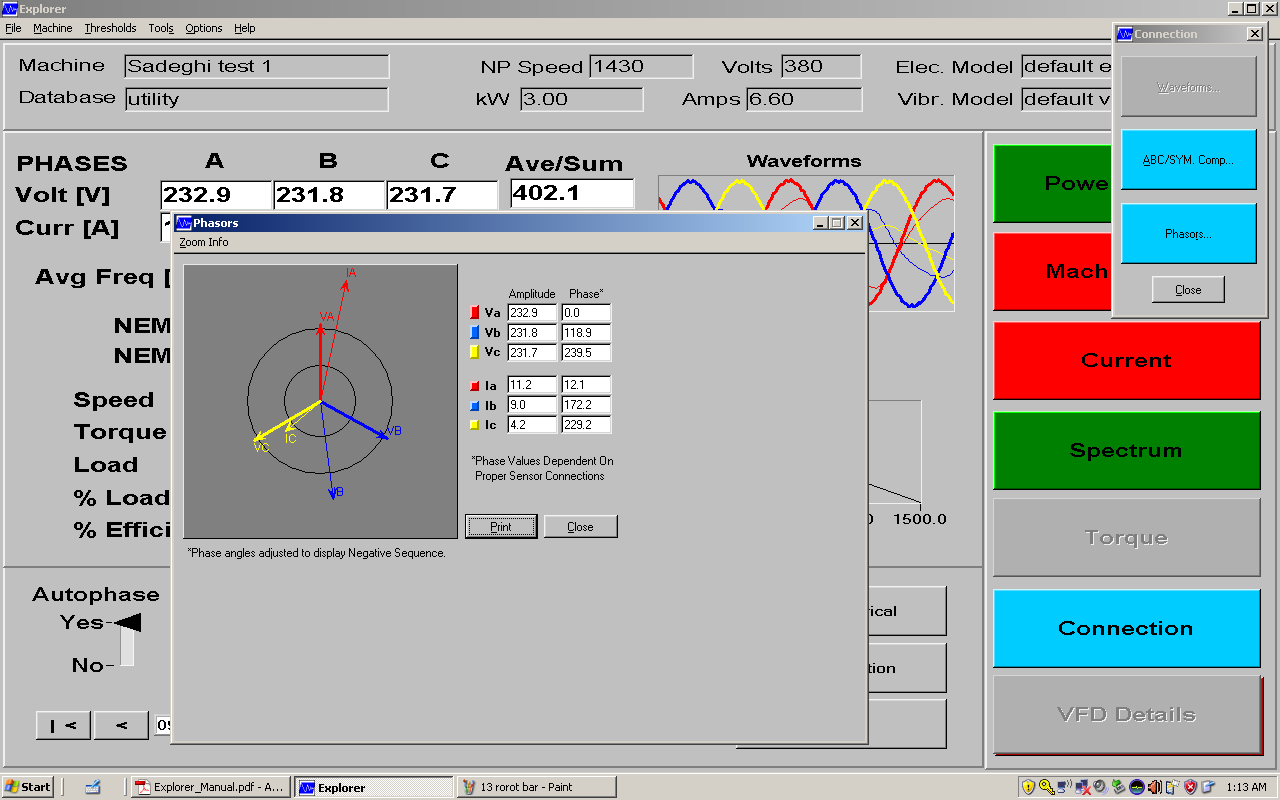
شکل 9: اندازه و زاویه فاز جریانها و ولتاژهای موتور در حالت عیب اتصال حلقه به حلقه 15درصد
همانطور که در شکل 8 مشاهده میشود، بهدلیل عیب اتصال حلقه به حلقه رفتار موتور، پارامتر Load رفتاری تحت اضافه بار شدید را نشان میدهد و شرایط 35 درصدی اضافه بار را ایجاد کرده است. همچنین نامتعادلی جریانهای استاتور به وضوح قابل رؤیت است که این موضوع به شبیه سازی درست عیب در آزمایشات صحه میگذارد. این عیب حتی سبب شده است که دور موتور نیز کاهش یابد و با گشتاور خروجی بیشتری به اندازه 8.3 نیوتنمتر نسبت به حالت مرجع بچرخد. شکل 9 نیز، نامتعادل بودن جریانها در حالت عیب را نشان میدهد. همانطور که مشاهده میشود بهدلیل مدل کردن عیب اتصال حلقه، اندازه جریانهای استاتور به مقدار زیاد نابرابر شده و همچنین مقادیر اختلاف فاز به شدت از اختلاف 120 درجهای دور گشته است که پیامد آن بالا رفتن دمای بدنه موتور میباشد. زیرا نامتعادلی جریان در موتورهای القایی سبب ایجاد جریانهایی با توالی منفی میگردد و دامنه این جریانهای با توالی منفی با مقدار نامتعادلی متناسب است. لازم به ذکر است اگر چنین شرایطی برای کارکرد موتور تا مدت زمان چند ده دقیقهای باقی میماند، منجر به سوختگی سیمپیچی موتور میشد.
5- نتيجهگيری
در این مقاله، از روش تحلیل پاسخ فرکانسی در دو حالت آنلاین و آفلاین برای بررسی رفتار و تشخیص عیب اتصال حلقه به حلقه در موتورهای سه فاز القایی روتور قفسهای استفاده شده است. با استفاده از بازپیچی مجدد سیمبندی دو موتور و مدلسازی واقعی عیب به اندازه 15 درصد اتصال کوتاه حلقه به حلقه سیمپیچ یکی از فازهای استاتور، کاربرد این روش مورد بررسی قرار گرفت. 326 نمونه گیری برای کل بازهها انجام شده است. نتایج نشان داد که در حالت آفلاین عیب مذکور نسبت به حالت مرجع نه تنها باعث کاهش نقطه اوج نمودار در فرکانس 177 کیلوهرتز شده، بلکه به مقدار 7.5 کیلوهرتز آن را نیز شیفت داده است. همچنین عیب واقع شده باعث انحراف نمودار فاز در فرکانسهای پایین زیر 1 کیلوهرتز شده است. در حالت آنلاین عیب مدلسازی شده موتور، تحت اضافه بار 35 درصدی نشان داده شده است و نامتعادلی دامنهها و فازهای جریانهای استاتور نیز قابل رویت شده است. لذا طبق مطالب گفته شده، این روش قادر به شناسایی این نوع عیب و بیان اختلاف آن نسبت به حالت مرجع میباشد.
مراجع
[1] C. W. T. McLyman, Transformer and inductor design handbook. CRC press, 2004.
[2] M. Ojaghi, M. Sabouri and J. Faiz, “Diagnosis methods for stator winding faults in three‐phase squirrel‐cage induction motors”. International transactions on electrical energy systems, Vol. 24, No. 6, pp. 891-912, 2014.
[3] P. Zhang, et al., “A Survey of Condition Monitoring and Protection Methods for Medium-Voltage Induction Motors”. IEEE Transactions on Industry Applications, Vol. 47, No. 1, pp. 34-46, 2011.
[4] A. K. Bonnett and G. C. Soukup. “Cause and analysis of stator and rotor failures in 3-phase squirrel cage induction motors”. in Conference Record of 1991 Annual Pulp and Paper Industry Technical Conference. 1991.
[5] W. T. Thomson and M. Fenger, “Current signature analysis to detect induction motor faults”. IEEE Industry Applications Magazine, Vol. 7, No. 4, pp. 26-34, 2001.
[6] M. Ojaghi, M. Sabouri and J. Faiz, “Diagnosis methods for stator winding faults in three-phase squirrel-cage induction motors”. International Transactions on Electrical Energy Systems, Vol. 24, No. 6, pp. 891-912, 2014.
[7] H. Tarimoradi and G. B. Gharehpetian, “Novel Calculation Method of Indices to Improve Classification of Transformer Winding Fault Type, Location, and Extent”. IEEE Transactions on Industrial Informatics, Vol. 13, No. 4, pp. 1531-1540, 2017.
[8] A. Siddique, G. Yadava and B. Singh, “A review of stator fault monitoring techniques of induction motors”. IEEE transactions on energy conversion, Vol. 20, No. 1, pp. 106-114, 2005.
[9] S. Nandi, H. A. Toliyat and X. Li, “Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review”. IEEE Transactions on Energy Conversion, Vol. 20, No. 4, pp. 719-729, 2005.
[10] Y. Lee, et al., “An acoustic diagnostic technique for use with electric machine insulation”. IEEE Transactions on Dielectrics and Electrical Insulation, Vol. 1, No. 6, pp. 1186-1193, 1994.
[11] M. Barzegaran, A. Mazloomzadeh and O. A. Mohammed, “Fault Diagnosis of the Asynchronous Machines Through Magnetic Signature Analysis Using Finite-Element Method and Neural Networks”. IEEE Transactions on Energy Conversion, Vol. 28, No. 4, pp. 1064-1071, 2013.

